
The Roomba j7 introduced a new feature set: using a camera on the front bumper to recognize and respond to obstacles on the floor, something we knew was important to furthering home robot autonomy (since home floors are often full of obstacles). This new technology opened an ocean of research questions: what should that bumper and camera look and feel like? how could we most effectively communicate with users about what data would be collected (with their consent), and how it would be handled? and how might users give the robot feedback on what objects it reacted to in the home?
Below are some brief highlights from three years of robot research.

Camera Perceptions and Privacy Experiences
(Physical Product)
Research goals: explore emotional responses to different bumper / camera designs; explore privacy attitudes and expectations for smart products in the home, especially those with cameras.
Methods: 1:1 interviews using models created by the Industrial Design team.
Outcomes:
Determined design direction for front bumper with camera
Identified key privacy questions and concerns to consider when designing onboarding and opt-in experience
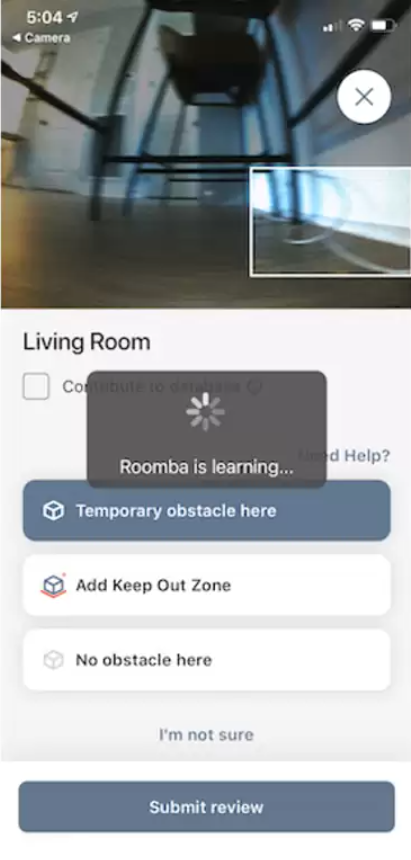

Behavior Understanding and Obstacle Avoidance Communication
(Physical Product + Digital Experience)
Research goals: define flow for user review of detected obstacles, including identifying desired level of granularity; continue to explore privacy attitudes and emotions; evaluate user perception of obstacle avoidance behaviors.
Methods: 1:1 interviews including card sort, clickable prototypes showing realistic data, and videos of robots reacting to home environment.
Outcomes:
Narrowed design direction for obstacle review experience
Identified model for how users determine whether to share images for robot learning, and defined direction for sharing flow
Identified user cues for interpreting robot behavior, supporting future user education design

Digital Onboarding Comprehension Evaluation
(Digital Experience)
Research goals: evaluate onboarding flow (all screens, copy, and visuals) to determine if users understand how the robot will operate in their home; particular focus on comprehension of new obstacle avoidance capabilities and how users decide whether to opt in to the feature or not.
Methods: remote 1:1 interviews via dScout using clickable prototype of onboarding experience
Outcomes:
Identified key user questions about robot capabilities to include in onboarding copy
Evaluation identified several improvements to flow, content, and formatting to improve experience and comprehension


Pre-launch Experience
(Physical + Digital)
Research goals: evaluate holistic user experience shortly before launch to identify remaining usability issues and / or risks.
Methods: longitudinal diary study (3 weeks) followed by 1:1 exit interviews, all via dScout.
Outcomes:
Shared initial reactions to the product’s physical design, digital experiences, and behaviors
Identified key areas of user confusion to target for education communications
Identified high-priority areas for digital experience improvements prior to launch


Post-launch Object Prioritization
(Physical Product)
Research goals: support prioritization of object learning updates by identifying which obstacles users would most want their robot to avoid.
Methods: quantitative card sort and ranking via Optimal Workshop.
Outcomes:
Created ranked list of obstacles to support development roadmap planning